Stepper Motor Control Box
My second internship at Teradyne's Nextest division, and this time I designed the stepper motor control box entirely on my own. The goal was a lightweight, precise motor controller — I chose Arduino for the brains and built the control logic from scratch in code I wrote myself.
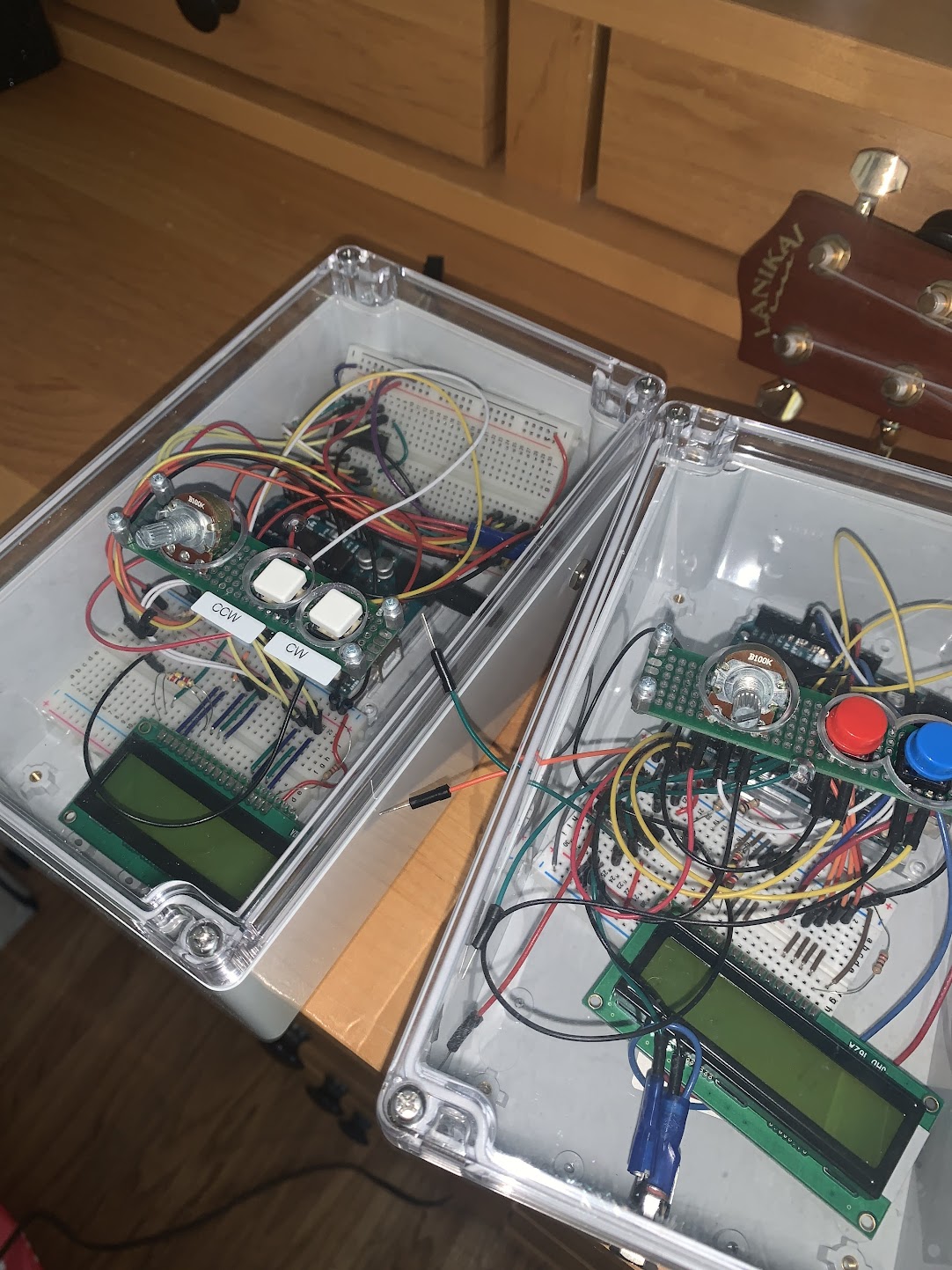
The operator controls motor speed and direction via a potentiometer, which maps to a percentage of one full revolution — giving highly precise, repeatable positioning. The LCD screen displays live step count and revolution percentage so there's always clear feedback. Directional control is bidirectional: CW and CCW buttons give the operator full command.
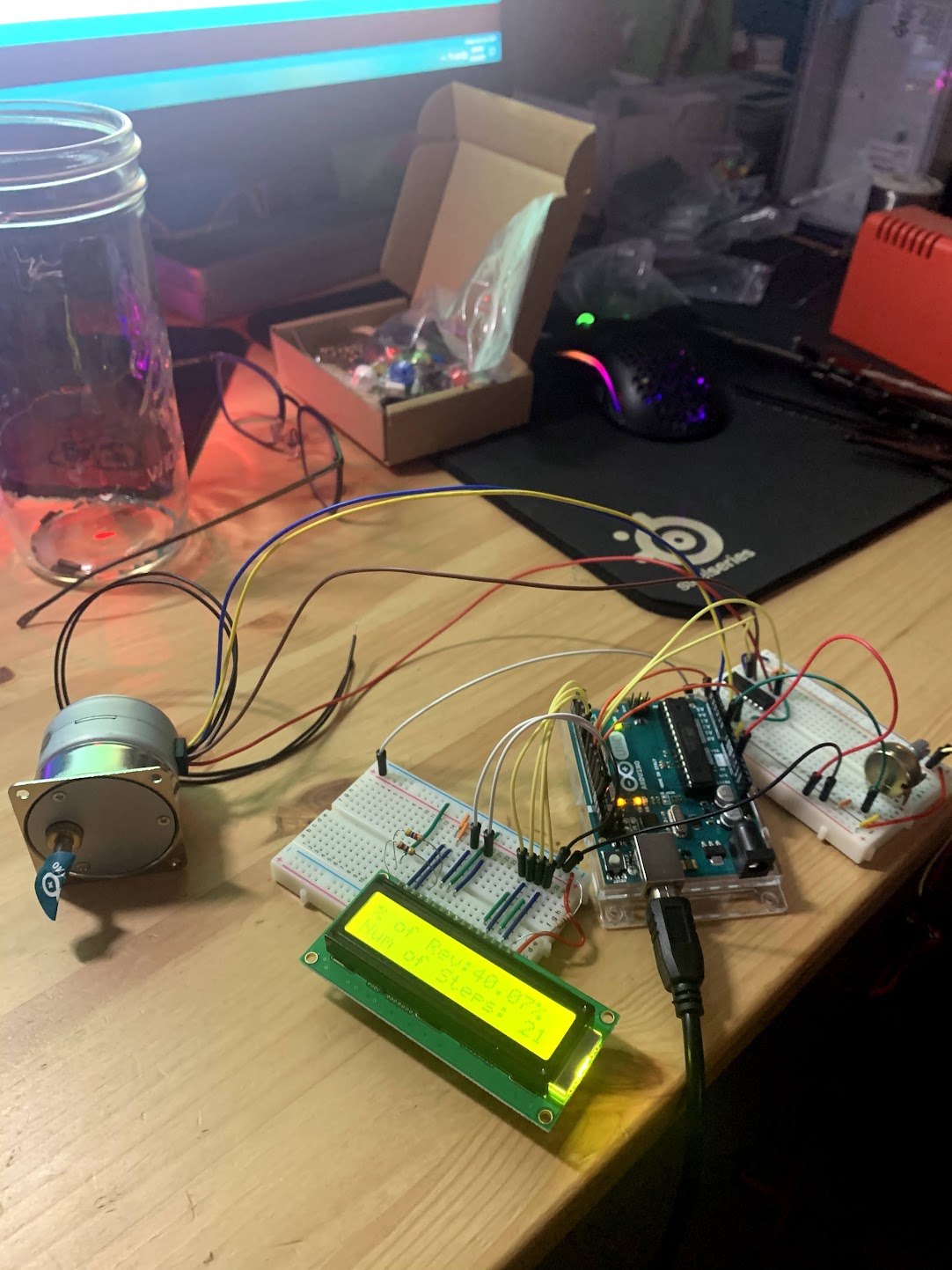
The pandemic sent me home partway through prototyping — the late-night desk shot below shows exactly that: stepper motor, Arduino, breadboard, LCD, and potentiometer wired up at home to keep development moving.
Features:
- Potentiometer speed control — maps to % of one full revolution
- Bidirectional CW / CCW control
- LCD displays step count and revolution percentage
- Custom wire harnesses and extension cables
- Arduino firmware written from scratch
Also this summer
HTR Motor Controller — Official Documentation
Skills sharpened this summer